北理哪吒(BIT-NAZA)
——记北理工电动并联式轮足机器人
华体会体育(中国):2017-12-18 供稿:党委宣传部 王征、韩姗杉 摄影:自动化学院
编辑:马瑶 审核:金军、包丽颖 阅读次数:
“上下颠倒”跳出华丽舞步
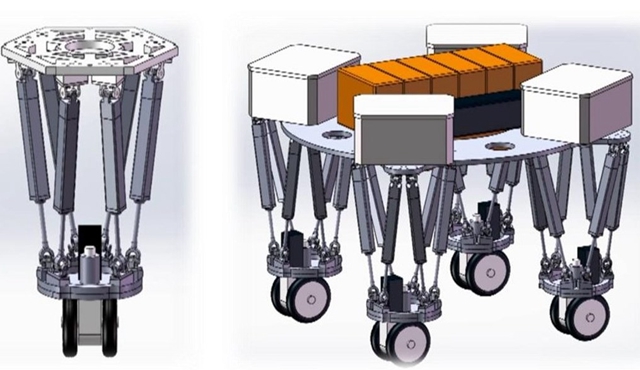
北理哪吒仿真模型
当前,移动机器人应用领域的迅猛扩展对其运动性能要求日益提高,要求机器人具有很好的运动速度、稳定性、负载能力和地形适应性,而单纯的足式运动、履带或轮式运动均难以同时满足上述要求。
自动化学院运动驱动与控制研究团队曾在2010年参与了国家“863”计划项目——液压四足机器人协同驱动控制研究。课题组的研究生们正是通过对四足机器人的研究,在指导教师的鼓励和指导下,大胆提出了一个“颠覆”性的技术方案,即将通常使用的并联式六自由度平台“上下颠倒”,化“台”为“腿”,并在“腿上”加装轮足机构。这一填补了国内外四足机器人研究空白的方案,极具创新性,堪称“北理工首创”。
然而,创新从来都不是空中楼阁,之所以能够产生“上下颠倒”的创新想法,离不开团队在并联式多自由度平台方面多年积累的研究优势,深厚的学术土壤,才让同学们的创新种子得以开花结果。
多自由度平台就是一种完全再现物体在空间六个自由度运动的可控机械装置,而这种再现还必须实现高精度、高频响和高稳定性等要求。另外,由于装置中杆件之间还有相互影响,所以研究难度远远大于我们熟悉的机械手臂等串联式平台。而“北理哪吒”的每条单腿都是一个由6根电动缸组成的六自由度平台,不仅要确保每条腿本身的运动协调,还要考虑四条腿一起运动时的控制协调,24根电动缸的“和谐共处”,给项目带来巨大挑战。
“我们需要解决单腿的控制,四条腿的协调控制、减震设计以及环境感知等一系列问题,才能真正实现机器人的自主判断及自主控制,这也是为什么我们从提出思路到做出样品中间做了那么长时间仿真模拟的原因,需要考虑的检测量和控制量实在是太多了。”说起设计过程,团队中的刘冬琛同学不无感慨。
除了做好运动协调,为腿上加装轮足装置,又是一个新的技术难点。加装轮足装置,可以让机器人的通过性、灵活度等变得更强,但在 “走路”的时候,却需要有体积足够小,质量足够轻的锁死装置将所有轮子锁死,这是一个不小的难题,经过长时间的精确计算和多次仿真模拟,同学们才终于攻克这个问题。
正是这种创新的“倒置”设计,再穿上“风火轮”,“北理哪吒”实现了轮式、足式和轮足复合式运动,综合起来能够实现轮式运动、原地转动、变轮距运动、变高度运动等10种“华丽舞步”,不仅能自由“走跑”,还能根据障碍情况,或“劈腿矮身”,或“旋转滑步”,可谓灵活非凡。
威风“哪吒”,功夫出在腿上
“这个机器人最大的特点是在腿上,就像脚踏风火轮的哪吒一样,风风火火,各种困难险阻都能跨越。”说起哪吒这一名字的由来,指导教师王军政教授笑称道。谈笑之间,却点明了这款机器人最关键的环节就是出色的运动驱动系统。
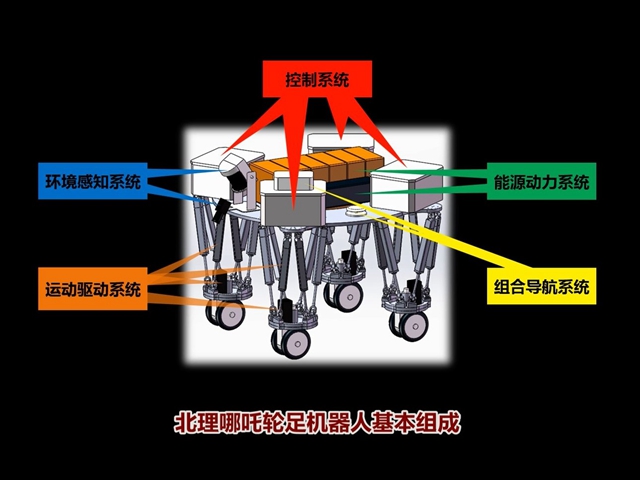
北理哪吒机器人基本组成
“北理哪吒”由运动驱动系统和控制系统、环境感知系统、组合导航系统、能源动力系统等组成。运动驱动系统是“腿脚”,由一组组杆状机构组成,造型酷帅。外行看热闹,内行看门道,殊不知,正是这一根根“杆件”才是“北理哪吒”的核心技术——一体化电动缸。机器人实现灵活丰富的运动、大承载力和良好的主动隔振效果,高功率密度一体化电动缸是其中的关键。
不同于液压缸和气动缸是依靠液、气的压力作为驱动力,电动缸依靠电机和丝杠等机械装置,将伺服电机的旋转运动转换成直线运动,具有高强度、高速度、高精度定位,运动平稳,低噪音等优势。自动化学院运动驱动与控制研究团队长期以来依托军工研究优势,不仅成为国内最早开展多自由度运动平台的研究力量,并逐渐在一体化电动缸方面形成研究优势,孕育一批重要的研究成果。
在此基础上,团队学生们才能大胆创新,将这个“颠覆”方案从设想变作现实,采用新型高功率密度一体化电动缸,将电机轴与丝杠杆结构合一,不仅外形更为紧凑,在驱动能力方面也实现较大提升。
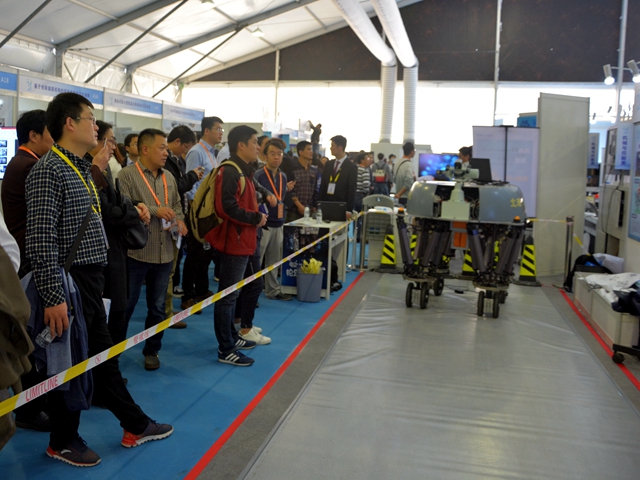
参加“挑战杯”比赛期间吸引众多观众
本次参加全国“挑战杯”的“北理哪吒”,采用轮式滑行最大速度可达每小时30公里,轮距可在0.5米到1米之间调整,机身高度可在1.2米到1.5米之间调整,最大爬坡角度为25°。机器人四个轮子可独立驱动,顺、逆时针原地可旋转;在遇到障碍物时,可自动调整轮距和底盘高度实现越障。同时,也可通过环境感知系统探测路径,自动实现直线、90度转弯、以及S型弯道等循迹运动。
足式运动“行走”时,“北理哪吒”的最大速度为每小时4公里,最大步幅0.3米,最大抬腿高度0.2米。由于结构中心对称,机器人能够“纵横”漫步,自由向任何方向直接移动,如果地形复杂,机器人凭借脚上的触觉传感器,还可以在不平地面上的漫步行走。
“平坦路面时,采用轮式运动,速度快、能源效率高,而复杂路面时,采用足式运动,环境适应性强、越障能力好。轮足复合运动时,机器人可以实现主动隔震并实时调整,保证水平稳定。”“北理哪吒”能自主切换运动模式,适应不同的环境,这样的“腿功”离不开团队在复杂运动控制理论方面的深厚积累。
一碗水能端“平”的“大力士”
“北理哪吒”并不是一台“为走而走”的机器,这在同学们策划项目之初,就在老师的指导下,有所考虑。创新方案设计,也赋予了其在承载力和隔震效果方面惊人的潜力。
这台 “北理哪吒”机器人,总功率为15千瓦,最大承载力达到300公斤,四个成年人直接乘坐,运动自如,如此负重续航可分别达到足式运动1小时、轮式运动2小时和轮足复合式运动45分钟。从负载重量与功率比来看,表现出色,潜力巨大。
除了出色的负重能力之外,要想成为有效的工作平台,还必须要确保平稳,否则其应用也将大打折扣,但在目前机器人研究中,要实现兼顾通过性、负重能力和隔振性能,可谓挑战巨大。
“北理哪吒”由于其使用倒置并联多自由度平台和轮足相结合作为支撑,特别是性能出色的一体化电动缸作为基本驱动装置,充分发挥了其控制准确、精度高的特点,使得动作过程平稳到位。而在最能考验隔振效果的轮足复合运动过程中,对振动可实现快速响应,“瞬间”化解冲击,确保平台的整体平稳。因此,“北理哪吒”是一位能将一碗水端“平”的“大力士”,名副其实。
除了以上的“神力”之外,团队还为“北理哪吒”安装了GPS、激光雷达和双目视觉功能的组合导航系统。由于运动方式灵活、能源效率高、地形适应性强和负载能力大等优势,“北理哪吒”应用前景广泛。例如在军用领域,既可以作为移动式无人武器平台,加装侦查、火力装备等,也可以作为战地后勤保障机器人或步兵班组支援系统,实现在平整道路上的快速突进和复杂地形下的稳定行进,大负载能力,可满足包括步兵班组装备携带等战地后勤需求。而在民用领域,可以在复杂地形下,实施抢险救灾和资源勘探,还可以为残障人士提供服务保障等。

运动驱动与控制研究团队
“北理哪吒”并不似神仙腾云驾雾,也没有花哨的三头六臂,原始创新的背后,并无太多传奇。北理工学子们脚踏实地创新研究的基础,来自于多年服务军工国防中积淀的学科优势,科学严谨、鼓励创新的学术氛围,和指导教师的循循善诱。而参与创新项目的同学们,更深深懂得不仅要埋头于实践中扎实钻研,把研究踏实做透,也要抬起头关注前沿,瞄准一流。





