【电脑报】中国无人驾驶冠军车炼成记
华体会体育(中国):2013-11-29 阅读次数:

不用考驾照,上班路上人们可以腾出双手做自己想做的事,盲人和老人也可以享受驾驶的乐趣,路上不会有交通事故,交警检查谁还在手动驾驶……”世博会上对2030年的无人驾驶和车联网商用的畅想,对华体会体育智能车辆研究所的龚建伟博士来说,也是他研究无人驾驶车的动力和目标。
10天前,由国家自然科学基金委员会主办的第五届“中国智能车未来挑战赛”上,来自国内多所高校及科研机构的17支参赛车队参与角逐,北理工的车队脱颖而出,龚建伟及其团队研发的第7代无人驾驶车“RAY”获得总冠军,龚建伟离心中的目标又进了一步。
11月2日至4日,江苏常熟市,天气晴好。
“我们的无人车不能在大雨天行驶,对于雨雪天气的处理,传感器信息会受到干扰,另外,一些外接设备在雨天可能失灵。”龚建伟说比赛前还是有些担心天气不好。
智能车挑战赛是在真实城郊道路和城区道路环境中进行的公开比赛,包括城郊道路(18公里)和城区道路(5公里)两个赛段。
据北理工参赛的老师介绍,与前四届比赛相比,此次比赛选择了更加复杂的道路环境,增加了拱桥、匝道口等场景。
城郊道路的考核点包括动态车辆干扰、交通信号灯识别、施工绕行、避障等,城区道路的考核点包括遇到行人停车让行,U-TURN、路口通行、学校门前减速慢性等。
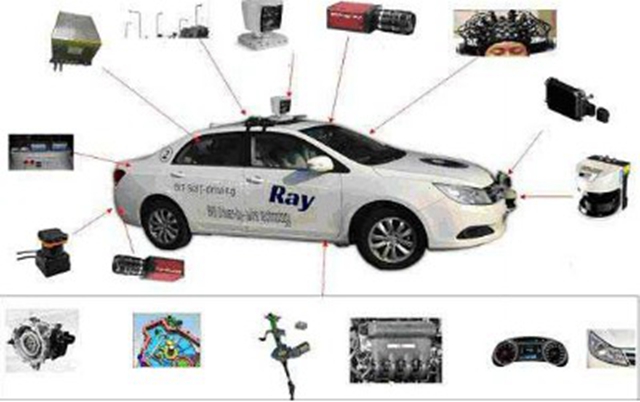
在出发点,参赛的车辆车型各异,因各研发机构控制的方法不同,因此车的装备也很不一样。有的车上还有和机械手一样的自动驾驶仪,有多个外接电机。北理工车队有三辆车参赛,其中“RAY”显得最清爽,从外观看,只在车顶有一摄像头,车前装有激光雷达和毫米波雷达,车身就是从4S店买来的比亚迪汽车。车内驾驶座旁的显示屏是给研发人员查看车况的,中控系统放在后排椅子下,电脑主机在后备箱。驾驶座、方向盘与我们平常车一样没有外接设备。
按比赛要求,出发前30分钟,气动电脑,把路网文件通过U盘拷到车载电脑上,规划路径。车载软件系统要能够自动处理该路网文件。在起始线前方,处于自主驾驶状态的参赛车辆在接收到路网文件后,应识别启动信号灯组,在绿灯亮起后3分钟内启动车辆,超过三分钟撤出当前比赛,重新排队出发。“RAY”看到绿灯亮起,稳稳起步。
每一辆无人驾驶车后都有一辆跟踪记录的裁判车,但不能通过无人车外的电脑指挥,控制权都在车上的系统上。

“在考点1,快到无信号灯的十字路口,前方一辆有人驾驶的直行车辆通过,RAY按路径规划要右转,没问题,RAY减速、停下等前方直行车过,然后右转。”龚建伟说在第二个考点,遇到红绿灯,RAY大约花10秒看到红灯亮,然后减速停车。
RAY不是第一个发车,但RAY的速度较快,比赛中超越了几辆速度较慢的赛车,第一天城郊的比赛,第二个到达终点。第二天的城区比赛,RAY表现优异。
不是每辆参赛车都能顺利完成考点任务,有的途中无故停下不动,有的翻车,有的速度太慢。
评委们按照安全性、智能、平稳性和速度给参赛车打分,RAY最后以综合分第一的成绩夺冠。
“第三天还有一场场地挑战赛,我们用RAY脑控完成了比赛。”龚建伟说的脑机控制就是研发人员戴上特制帽子,可以检测头部的信号,转换成电脑指令,控制汽车。脑机研究是另一个研发团队的成果,RAY的控制接口开放,就可以实现按照人的意识开车。
车里的人脑子里想着开车,汽车就会启动,前面有弯道,转弯,OK,车就转弯。“以后在高速路上,脑子里想找加油站,车就会开往最近的休息区加油站。”龚建伟说脑机控制目前还仅限于场地测试,信息监测与处理反应速度太慢是主要原因。
记者看了龚教授录制的视频,相对于城郊路上无人驾驶几十公里的时速,脑机控制车行速度的确缓慢。
高路上对无人驾驶车而言,是最好的路况环境。比赛完后,龚建伟带着队员从江苏回北京的路上还测试了一段RAY的性能。
“大约100公里的高速路,RAY无人驾驶状态跑了约1小时,最高时速120公里,这100公里路上车少,RAY只超了几辆货车。”
“其他时段我们还是人工驾驶RAY回来的。”
“无人驾驶车也可以人工驾驶?”对记者的疑惑,龚建伟让记者坐上RAY,在北理工校园里人工驾驶跑了200米。
“这就是4S店买来的车,我们并未作硬件改造,当然可以无人驾驶和人工驾驶切换。”
龚建伟解释道“我们与比亚迪有深度合作,在已有的车载CAN总线基础上,通过设置通讯协议并进行智能化改造,实现对车辆运动状态的读取并对车辆运动进行控制。”
从今年3月份开始,北理工项目组人员出差深圳20多人次,和比亚迪技术人员经过3个多月的软件程序改造,车辆本身没有任何硬件和机构方面的改动,完成速锐车的自动驾驶改造;同时,由华体会体育在比亚迪北京4S店购置新车,上牌照后重新升级车内控制程序,实现了自动驾驶。
到11月比赛前,完成“RAY”的感知、规划决策和路径规划与跟踪系统的测试,并完成近700km的无人驾驶道路测试。
龚建伟眼中的自动驾驶没有太多神秘,其实是对环境的视听感知与学习,基本配置是电脑、摄像头、雷达及声音感知器件。
其中工控机负责车体定位、路径规划、路径跟踪、决策融合和控制,对环境的识别、障碍物的识别、交通标志的识别也是工控计算机的任务。
RAY装备的工控机性能与一般的笔记本性能相当,摄像头也不是非常昂贵,价值几千元,车前的两种雷达探测40米近距离和100米远距离的物体,声音感应器用来区别后方来的车是否救护车、救火车之类,同时作出判断让路。据介绍,RAY总体改造成本大约30万元,加上十几万元的买车款,不到50万元。
“这样说来,发烧友也可以做这方面的研究?”
“当然,我估算了一下,如果加载的设备不用太精良,10万元也可以做无人驾驶车。我们会把研发的一些成果,比如软件模块放在网上给爱好者下载,加上以后车联网实现,又可以减少车上的一些感应器,通过车联网,靠近的车可以相互交换信息,知道旁边车的行驶路径和速度,自然不会发生交通事故。”
北理工研发无人驾驶车,始于1995年,当时与国防科大、南京理工、浙江大学、清华大学一起研发的第一代无人驾驶车,现在还在北理工的陈列室里。
然后是第二代、第三代,其应用已经在军事领域初见成效。无论是庞大的装甲车,还是小巧的模型车,无人驾驶的智能化程度在逐步提升。
2000年起,北理工的团队独立研发无人车,最近刚成立了“地面无人系统研究院”,集合计算机、自动化、车辆工程等专业人才研发无人驾驶系统。“我们能夺冠的优势在于对汽车工程的深入了解,还在人工智能上有长期技术积累的总结。”
“明年,‘视听觉信息的认知计算’重大研究计划将要实现2000km以上的长距离无人行驶目标,北理工的无人车会通过2000公里的高速路测试,我们计划从北京跑到深圳。”龚建伟团队与比亚迪的合作还将继续。
为了提升稳定性和可靠性,研发团队将进项大量道路测试及相关研究工作,提升改平台在自动驾驶方面的性能与指标,保证软件代码的可靠性和扩展性,同时,对电动助力系统长时间工作的可靠性进行实验测试,采用更大功率的转向电机控制器,提高对于多种路面的适应性。
在操作方便性方面,将在短时间内增加方向盘干预方式,即在自动驾驶模式下,只要人一握方向盘及其他操作件,就能感知到人的干预,自动退出自动驾驶模式。
“还将在电动汽车、混合动力汽车平台上探索无人驾驶车辆技术,研究新能源车辆实现无人驾驶的特点。”
在龚建伟提供的视频中,无人驾驶车载码头集装箱货物集中的地方已经有应用试验,相对单纯的路线、路况,是码头货运车采用无人驾驶的一个有利条件。

业界对车联网的态度也将决定无人驾驶车的研发进程。专家预估未来两三年,车联网在北京、上海的试行,将带动无人驾驶和人工驾驶进入混合运行模式。
10天前,由国家自然科学基金委员会主办的第五届“中国智能车未来挑战赛”上,来自国内多所高校及科研机构的17支参赛车队参与角逐,北理工的车队脱颖而出,龚建伟及其团队研发的第7代无人驾驶车“RAY”获得总冠军,龚建伟离心中的目标又进了一步。
赛场内外的比拼
11月2日至4日,江苏常熟市,天气晴好。
“我们的无人车不能在大雨天行驶,对于雨雪天气的处理,传感器信息会受到干扰,另外,一些外接设备在雨天可能失灵。”龚建伟说比赛前还是有些担心天气不好。
智能车挑战赛是在真实城郊道路和城区道路环境中进行的公开比赛,包括城郊道路(18公里)和城区道路(5公里)两个赛段。
据北理工参赛的老师介绍,与前四届比赛相比,此次比赛选择了更加复杂的道路环境,增加了拱桥、匝道口等场景。
城郊道路的考核点包括动态车辆干扰、交通信号灯识别、施工绕行、避障等,城区道路的考核点包括遇到行人停车让行,U-TURN、路口通行、学校门前减速慢性等。
在出发点,参赛的车辆车型各异,因各研发机构控制的方法不同,因此车的装备也很不一样。有的车上还有和机械手一样的自动驾驶仪,有多个外接电机。北理工车队有三辆车参赛,其中“RAY”显得最清爽,从外观看,只在车顶有一摄像头,车前装有激光雷达和毫米波雷达,车身就是从4S店买来的比亚迪汽车。车内驾驶座旁的显示屏是给研发人员查看车况的,中控系统放在后排椅子下,电脑主机在后备箱。驾驶座、方向盘与我们平常车一样没有外接设备。
按比赛要求,出发前30分钟,气动电脑,把路网文件通过U盘拷到车载电脑上,规划路径。车载软件系统要能够自动处理该路网文件。在起始线前方,处于自主驾驶状态的参赛车辆在接收到路网文件后,应识别启动信号灯组,在绿灯亮起后3分钟内启动车辆,超过三分钟撤出当前比赛,重新排队出发。“RAY”看到绿灯亮起,稳稳起步。
每一辆无人驾驶车后都有一辆跟踪记录的裁判车,但不能通过无人车外的电脑指挥,控制权都在车上的系统上。
2013年11月4日上午于江苏常熟闭幕式广场进行的脑控车辆演示场景
“在考点1,快到无信号灯的十字路口,前方一辆有人驾驶的直行车辆通过,RAY按路径规划要右转,没问题,RAY减速、停下等前方直行车过,然后右转。”龚建伟说在第二个考点,遇到红绿灯,RAY大约花10秒看到红灯亮,然后减速停车。
RAY不是第一个发车,但RAY的速度较快,比赛中超越了几辆速度较慢的赛车,第一天城郊的比赛,第二个到达终点。第二天的城区比赛,RAY表现优异。
不是每辆参赛车都能顺利完成考点任务,有的途中无故停下不动,有的翻车,有的速度太慢。
评委们按照安全性、智能、平稳性和速度给参赛车打分,RAY最后以综合分第一的成绩夺冠。
“第三天还有一场场地挑战赛,我们用RAY脑控完成了比赛。”龚建伟说的脑机控制就是研发人员戴上特制帽子,可以检测头部的信号,转换成电脑指令,控制汽车。脑机研究是另一个研发团队的成果,RAY的控制接口开放,就可以实现按照人的意识开车。
车里的人脑子里想着开车,汽车就会启动,前面有弯道,转弯,OK,车就转弯。“以后在高速路上,脑子里想找加油站,车就会开往最近的休息区加油站。”龚建伟说脑机控制目前还仅限于场地测试,信息监测与处理反应速度太慢是主要原因。
记者看了龚教授录制的视频,相对于城郊路上无人驾驶几十公里的时速,脑机控制车行速度的确缓慢。
高路上对无人驾驶车而言,是最好的路况环境。比赛完后,龚建伟带着队员从江苏回北京的路上还测试了一段RAY的性能。
“大约100公里的高速路,RAY无人驾驶状态跑了约1小时,最高时速120公里,这100公里路上车少,RAY只超了几辆货车。”
“其他时段我们还是人工驾驶RAY回来的。”
与“RAY”同行
“无人驾驶车也可以人工驾驶?”对记者的疑惑,龚建伟让记者坐上RAY,在北理工校园里人工驾驶跑了200米。
“这就是4S店买来的车,我们并未作硬件改造,当然可以无人驾驶和人工驾驶切换。”
龚建伟解释道“我们与比亚迪有深度合作,在已有的车载CAN总线基础上,通过设置通讯协议并进行智能化改造,实现对车辆运动状态的读取并对车辆运动进行控制。”
从今年3月份开始,北理工项目组人员出差深圳20多人次,和比亚迪技术人员经过3个多月的软件程序改造,车辆本身没有任何硬件和机构方面的改动,完成速锐车的自动驾驶改造;同时,由华体会体育在比亚迪北京4S店购置新车,上牌照后重新升级车内控制程序,实现了自动驾驶。
到11月比赛前,完成“RAY”的感知、规划决策和路径规划与跟踪系统的测试,并完成近700km的无人驾驶道路测试。
龚建伟眼中的自动驾驶没有太多神秘,其实是对环境的视听感知与学习,基本配置是电脑、摄像头、雷达及声音感知器件。
其中工控机负责车体定位、路径规划、路径跟踪、决策融合和控制,对环境的识别、障碍物的识别、交通标志的识别也是工控计算机的任务。
RAY装备的工控机性能与一般的笔记本性能相当,摄像头也不是非常昂贵,价值几千元,车前的两种雷达探测40米近距离和100米远距离的物体,声音感应器用来区别后方来的车是否救护车、救火车之类,同时作出判断让路。据介绍,RAY总体改造成本大约30万元,加上十几万元的买车款,不到50万元。
无人驾驶汽车的各种电子部件
“这样说来,发烧友也可以做这方面的研究?”
“当然,我估算了一下,如果加载的设备不用太精良,10万元也可以做无人驾驶车。我们会把研发的一些成果,比如软件模块放在网上给爱好者下载,加上以后车联网实现,又可以减少车上的一些感应器,通过车联网,靠近的车可以相互交换信息,知道旁边车的行驶路径和速度,自然不会发生交通事故。”
北理工研发无人驾驶车,始于1995年,当时与国防科大、南京理工、浙江大学、清华大学一起研发的第一代无人驾驶车,现在还在北理工的陈列室里。
然后是第二代、第三代,其应用已经在军事领域初见成效。无论是庞大的装甲车,还是小巧的模型车,无人驾驶的智能化程度在逐步提升。
2000年起,北理工的团队独立研发无人车,最近刚成立了“地面无人系统研究院”,集合计算机、自动化、车辆工程等专业人才研发无人驾驶系统。“我们能夺冠的优势在于对汽车工程的深入了解,还在人工智能上有长期技术积累的总结。”
下一代无人车计划
“明年,‘视听觉信息的认知计算’重大研究计划将要实现2000km以上的长距离无人行驶目标,北理工的无人车会通过2000公里的高速路测试,我们计划从北京跑到深圳。”龚建伟团队与比亚迪的合作还将继续。
为了提升稳定性和可靠性,研发团队将进项大量道路测试及相关研究工作,提升改平台在自动驾驶方面的性能与指标,保证软件代码的可靠性和扩展性,同时,对电动助力系统长时间工作的可靠性进行实验测试,采用更大功率的转向电机控制器,提高对于多种路面的适应性。
在操作方便性方面,将在短时间内增加方向盘干预方式,即在自动驾驶模式下,只要人一握方向盘及其他操作件,就能感知到人的干预,自动退出自动驾驶模式。
“还将在电动汽车、混合动力汽车平台上探索无人驾驶车辆技术,研究新能源车辆实现无人驾驶的特点。”
在龚建伟提供的视频中,无人驾驶车载码头集装箱货物集中的地方已经有应用试验,相对单纯的路线、路况,是码头货运车采用无人驾驶的一个有利条件。
无人驾驶汽车的控制设备
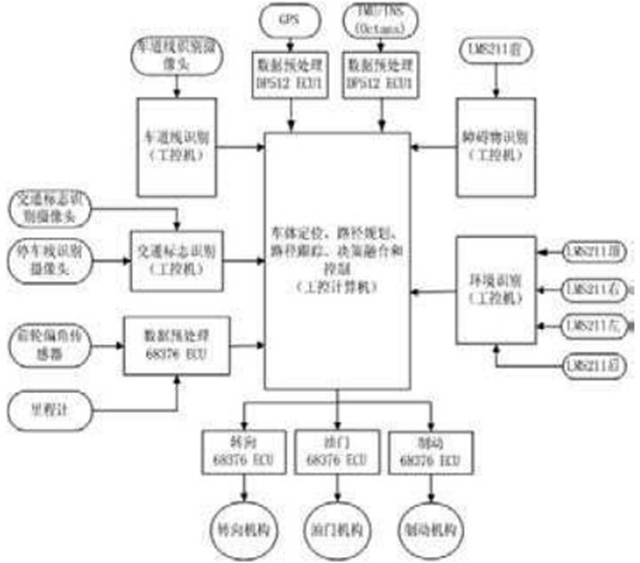
无人驾驶汽车的技术分布图
无人驾驶汽车的技术分布图
未来如果与地图厂商合作,无人驾驶车就可以在更广泛的道路上行驶,“不过,现在无人车还没有到商用的地步,与地图厂商的合作还是下一步。”
业界对车联网的态度也将决定无人驾驶车的研发进程。专家预估未来两三年,车联网在北京、上海的试行,将带动无人驾驶和人工驾驶进入混合运行模式。
分享到: